Um den Robomow nicht nur per Bluetooth App zu starten, sondern in meinem Fall per Smarthome System, habe ich den Robomow RC304 Rasenroboter erweitert.
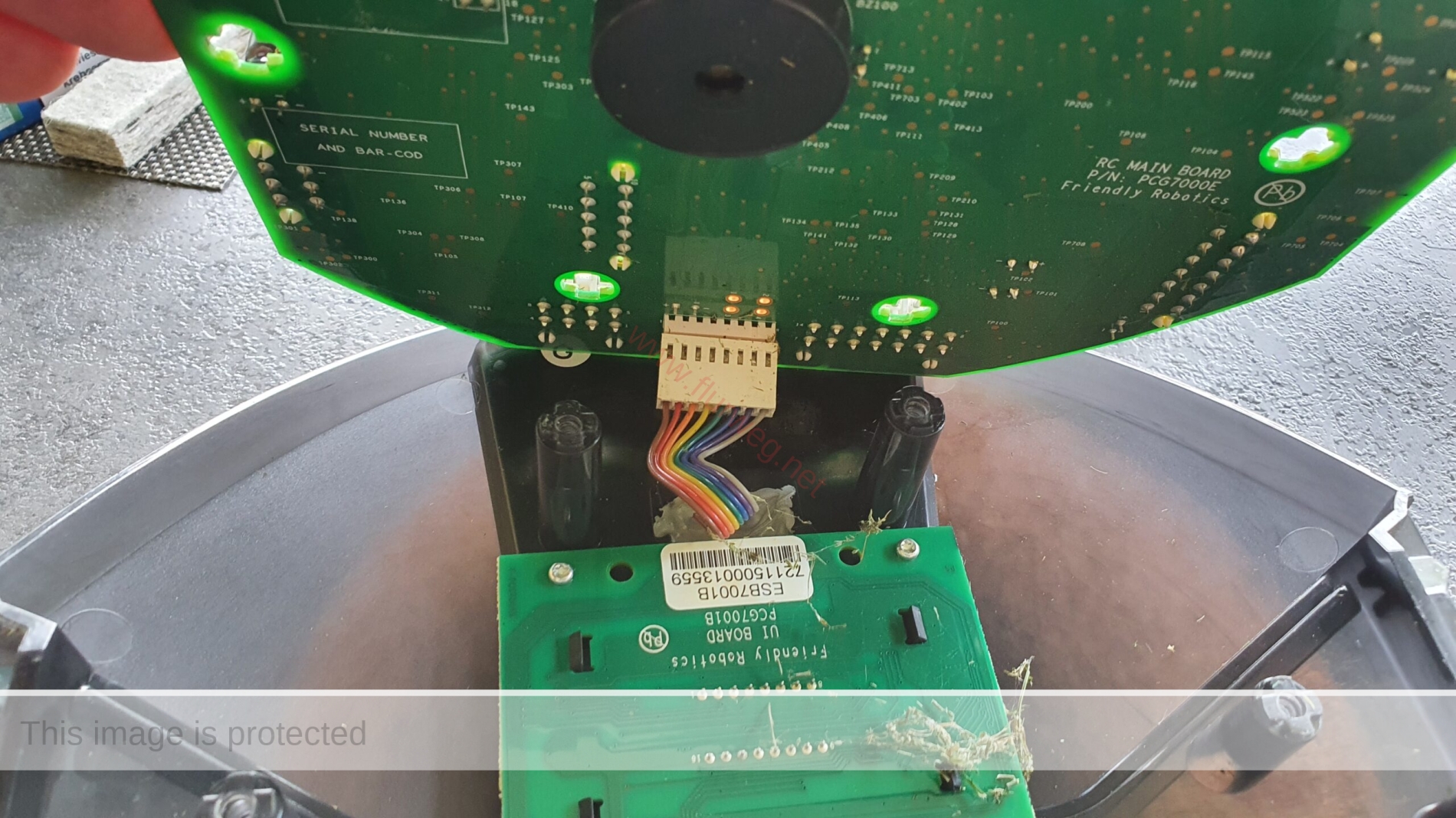
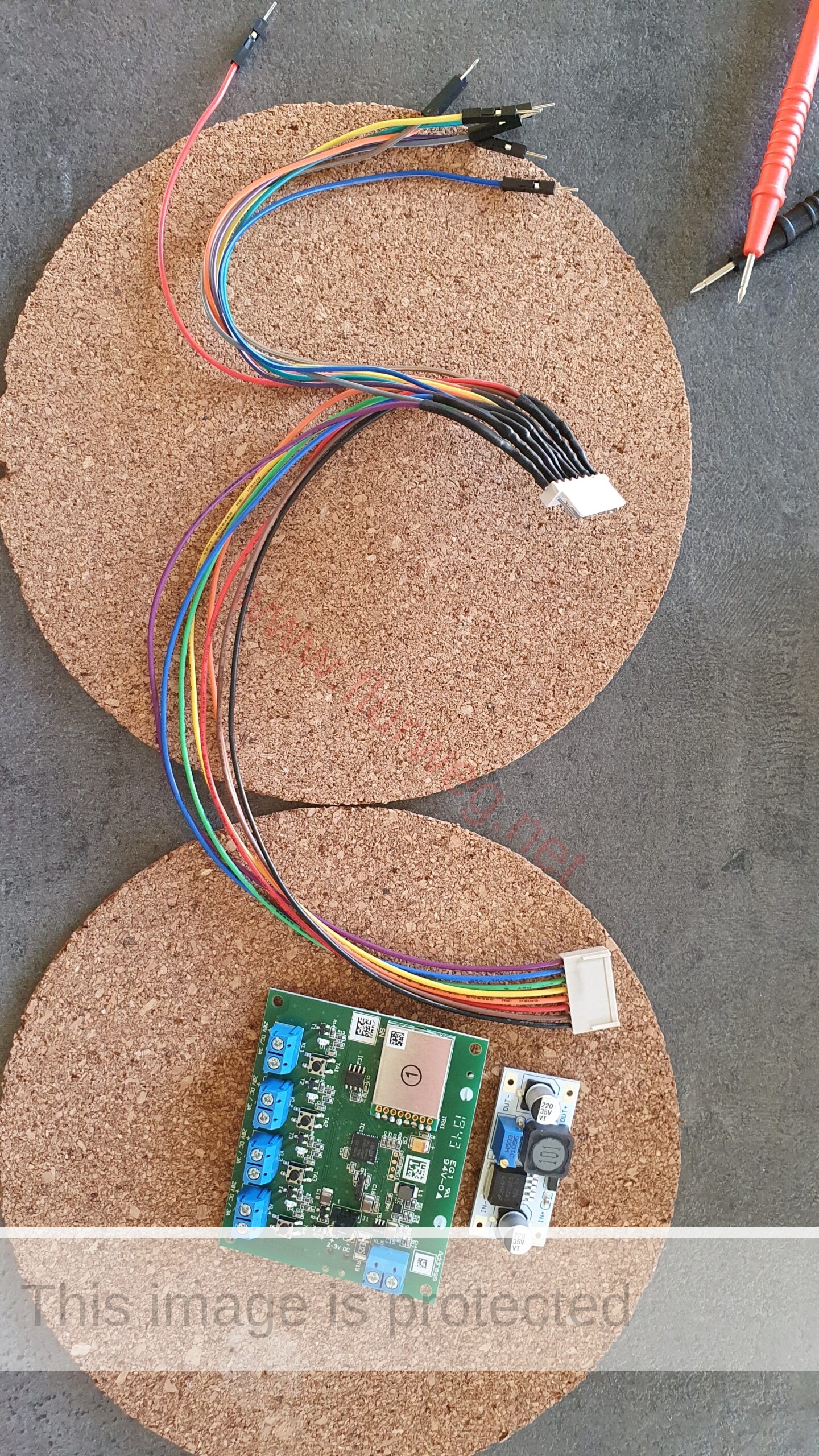
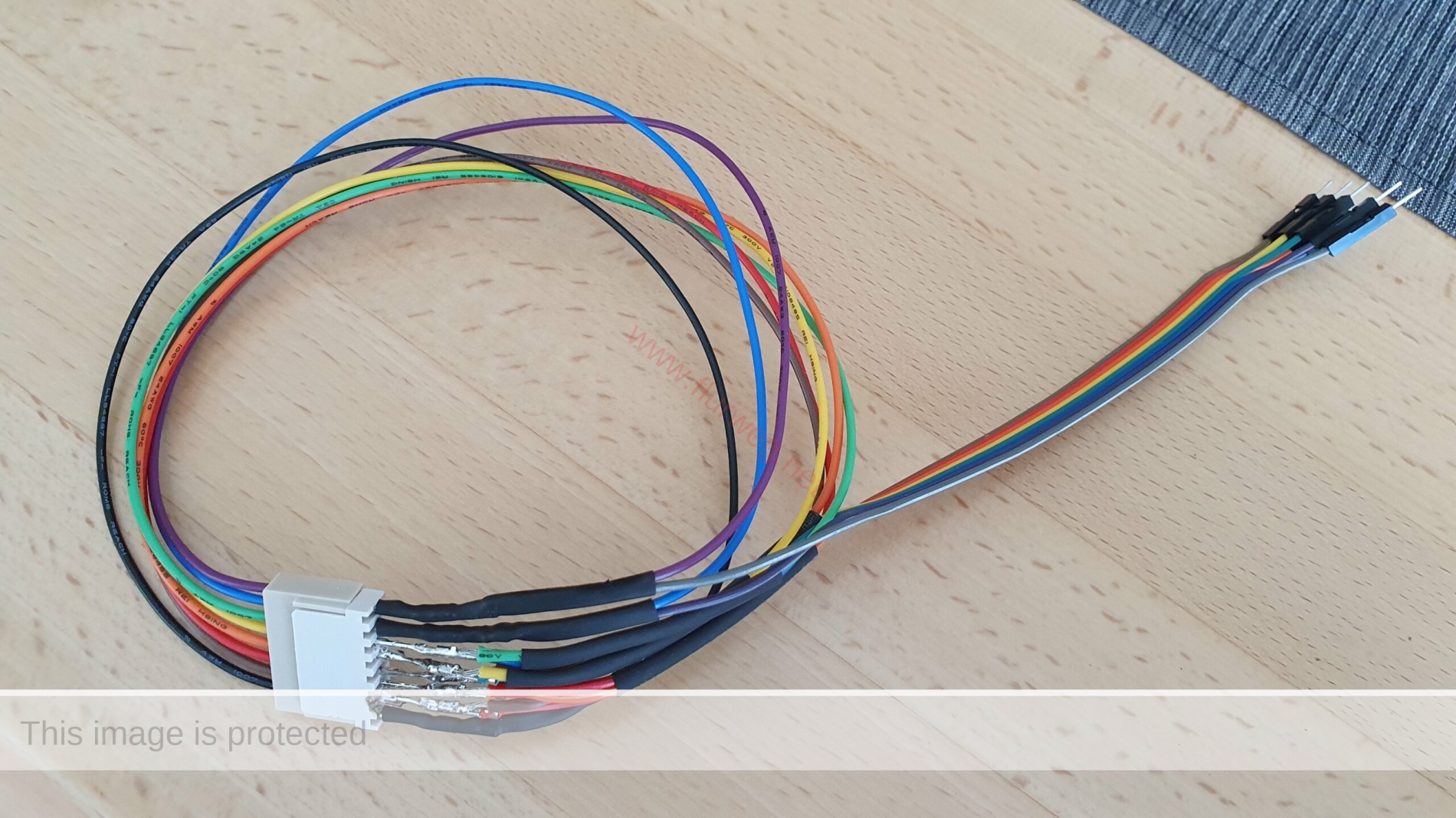
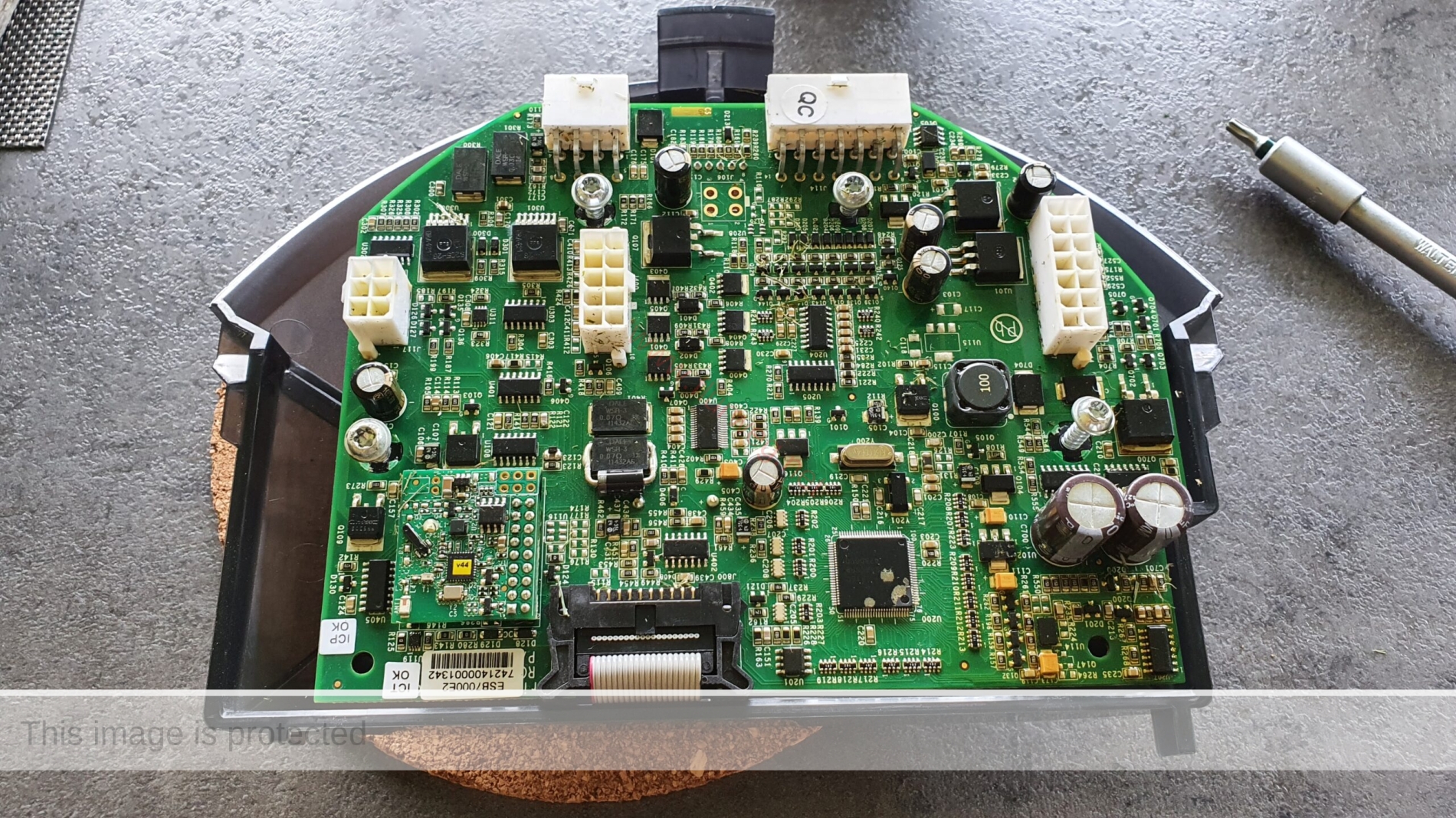
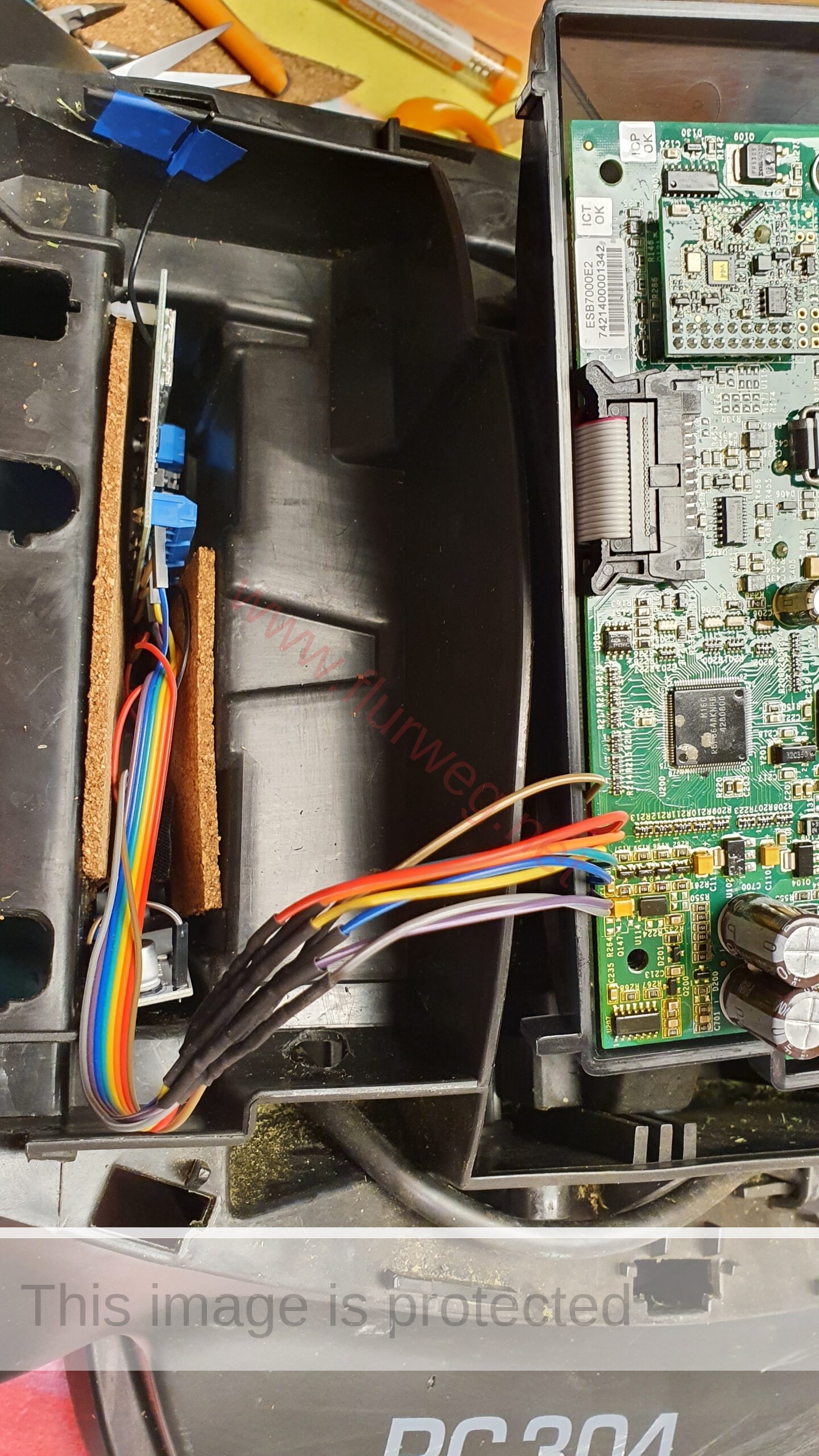
Dazu wurde der 8 polige Stecker vom Display zum Mainboard um einen Zwischenstecker erweitert.
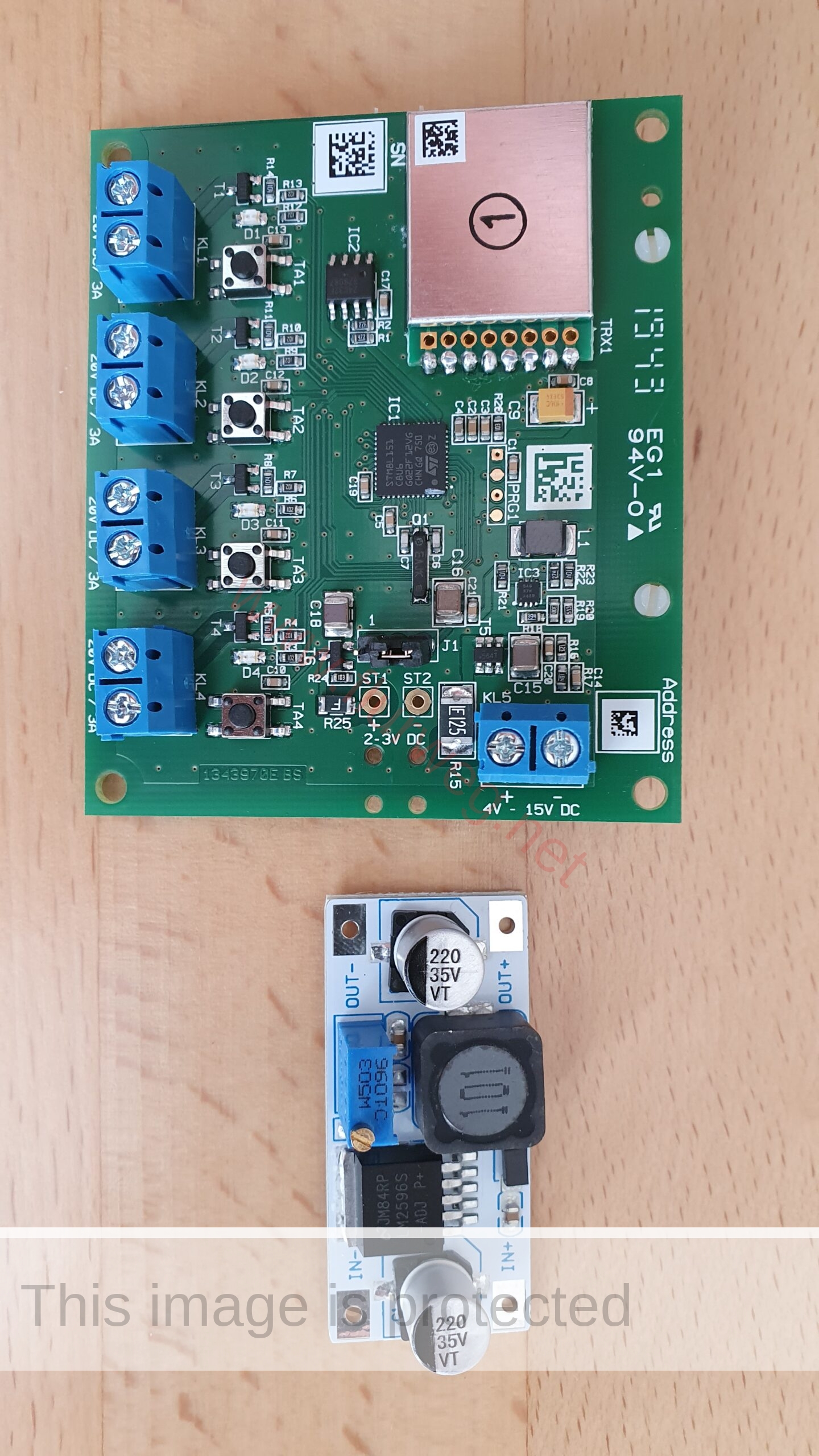
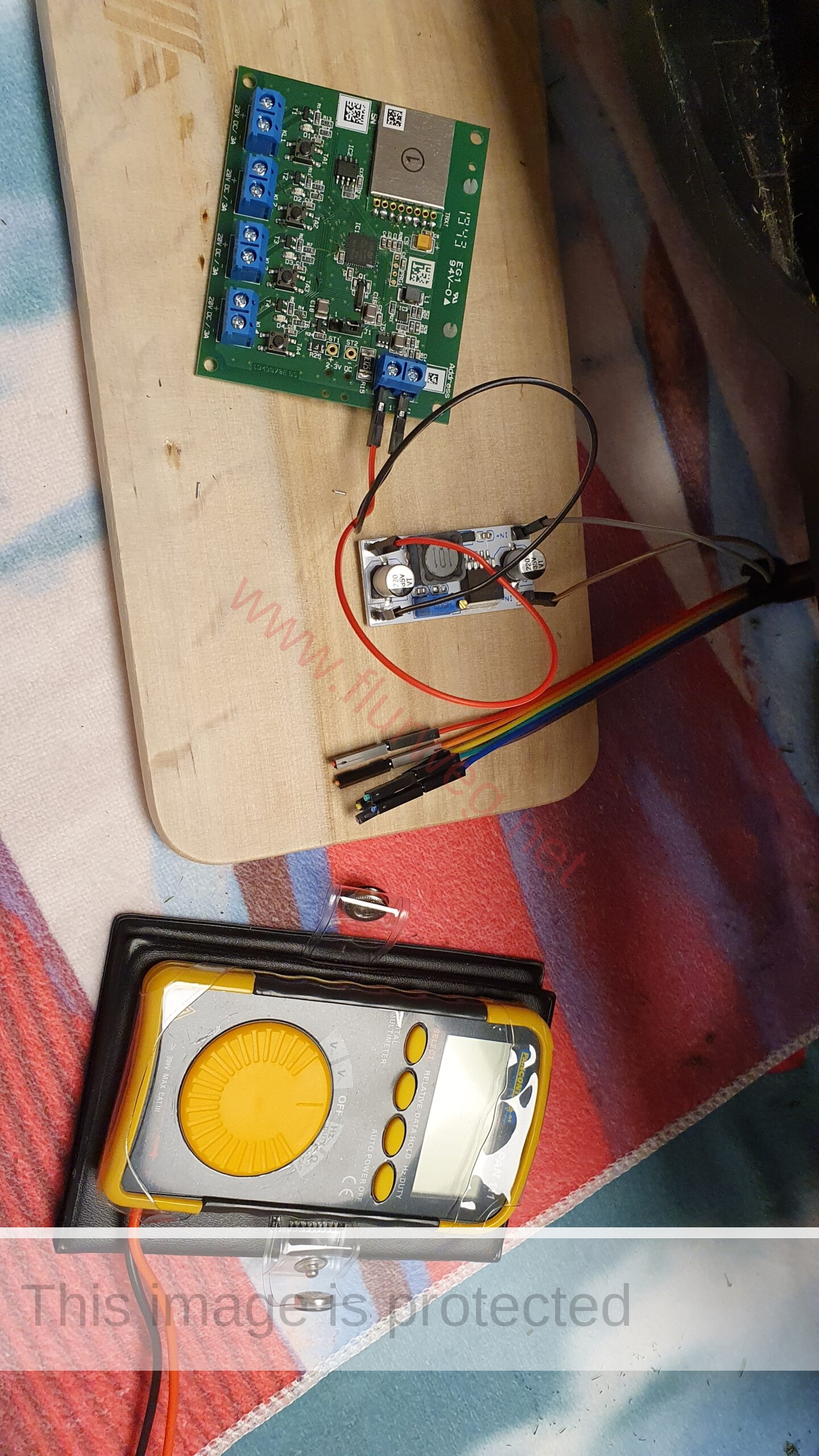
Als 4-Kanal Aktor wurde der Homematic Bausatz [HM-LC-Sw4-Ba-PCB] verwendet. Die 4 Kanäle werden für die Tasten OK, Stop, Home und “Mähen mit Kante” verwendet. Da der Roboter mit 26V Spannung arbeitet, der Homematic Aktor jedoch zwischen 4-15V unterstützt, wurde diese per Step-Down-Wandler auf 6V reduziert.
Teileliste:
Amazon:
- 1x TIMESETL 508Stück Schrumpfschlauch Set | € 9,99
- 1x Elegoo Jumper Wire 40x 20cm Kabel Steckbrücken | € 6,99
ELV:
- 1x econ connect Stiftleiste PSL8G, 1x 8-polig, gerade, RM 2,54 mm | € 0,05
- 1x econ connect Steckverbinder PS8, 1x 8-polig, 30 cm, RM 2,54 mm | € 0,69
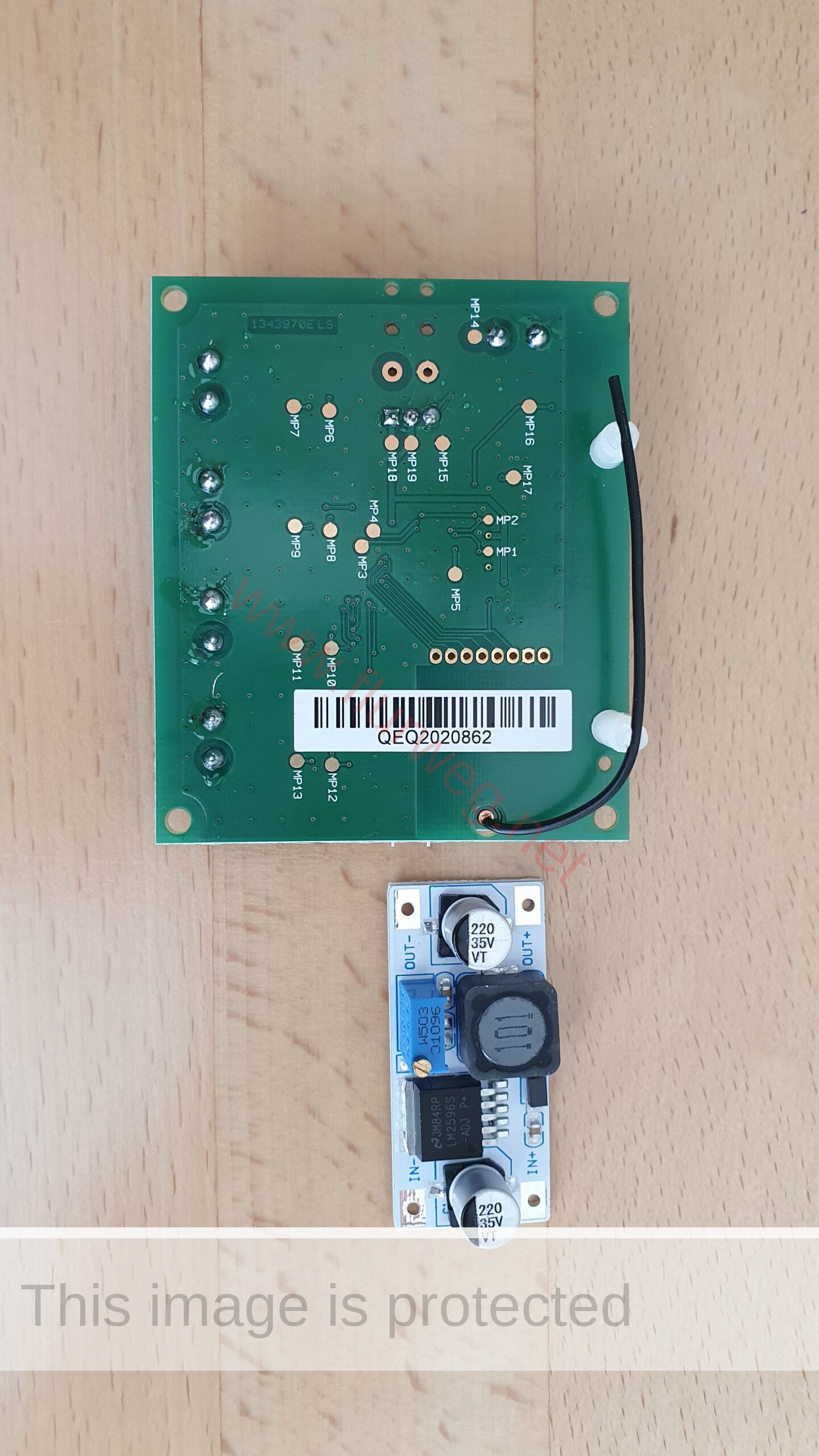
- 1x Velleman Step-down-Wandler LM2596S | € 5,99
- 1x ELV Homematic Komplettbausatz 4-Kanal (HM-LC-Sw4-Ba-PCB) | € 19,95
| Steckerbelegung | Homematic Taster | |
| Braun | Masse – | TA1-2,TA2-2,TA3-2,TA4-2 |
| Rot | Stop | TA4-1 |
| Gelb | Mähen mit Kante | TA2-1 |
| Grün | Mähen ohne Kante | |
| Blau | Home | TA1-1 |
| Lila | Ok | TA3-1 |
| Grau | 26V+ |
Die Homematic Signalstärke (RSSI) waren mit über -150db im tiefroten Bereich, ich habe aus diesem Grund später ein “RP-SMA-Kabel” und eine WLAN-Antenne (aus einem alten Router) an die vorhandene Antenne des Homematic-Aktors angelötet. (Innenleiter an vorhandene Homematic Antenne, Aussenleiter an das WLAN-Gehäuse des Homematic). Die Werte liegen nun bei akzeptablen -80 bis -110 db.

Bilder:






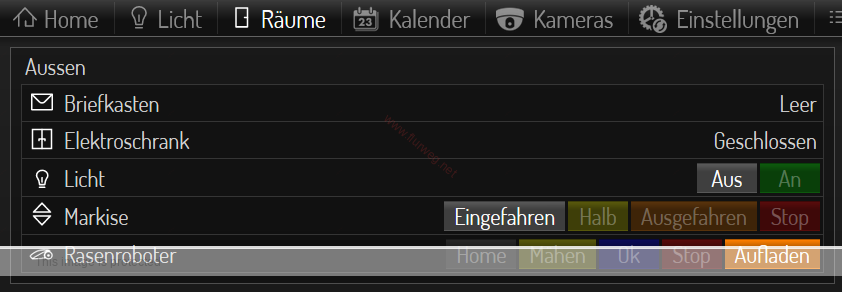
Ansicht im Smarthome:
Symcon Script:
<?php//Robomow TasterSetValue($_IPS['VARIABLE'], $_IPS['VALUE']);/*Belegung: (Taster/Kabelfarbe)Home TA1 (Blau)Mähen mit Kante TA2 (Gelb)Ok TA3 (Lila)Stop TA4 (Rot)*///Aktor-Kanäle beim "HM-LC-Sw4-Ba-PCB" sind TA1-4$TA1 = 46727;$TA2 = 26901;$TA3 = 30994;$TA4 = 29557;//Homeif ( $_IPS['VALUE'] == 0 ) {IPS_LogMessage($_IPS['SELF'], "Robomow: Home");Taster($TA1);HM_WriteValueBoolean($TA1, "STATE", true); //Home//Mähen} elseif ( $_IPS['VALUE'] == 1 ) {IPS_LogMessage($_IPS['SELF'], "Robomow: Mähen");Taster($TA4);HM_WriteValueBoolean($TA4, "STATE", true); //Erstmal STOP drückensleep(2);Taster($TA2);HM_WriteValueBoolean($TA2, "STATE", true);//Ok} elseif ( $_IPS['VALUE'] == 2 ) {IPS_LogMessage($_IPS['SELF'], "Robomow: Ok");Taster($TA3);HM_WriteValueBoolean($TA3, "STATE", true);//Stop} elseif ( $_IPS['VALUE'] == 3 ) {IPS_LogMessage($_IPS['SELF'], "Robomow: Stop");Taster($TA4);HM_WriteValueBoolean($TA4, "STATE", true);}function Taster($Taster) {HM_WriteValueFloat($Taster, "ON_TIME", 0.2);sleep(0.25);}
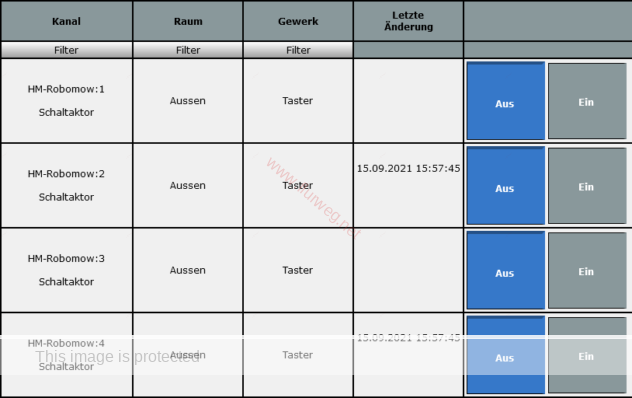
Homematic CCU Aktor
War auch meine Idee, mit meinem kleinen Loopo S150. Gleich gehts ans Werk!
Hallo Simon,
ich habe dein Projekt mit der Einbindung des Robomow RC304 durchgelesen und bin begeistert.
Das Ganze im Mäher so anzuschließen glaube ich mir zuzutrauen. Das werde ich dann sehen, wenn ich den Mäher aufgeschraubt habe .
Wie wird denn das ganze in die Homematic CCU eingebunden, bzw. wie wird ein php-Script dazu herangezogen?
Für eine Rückantwort bzw. Hilfe wäre ich dankbar.
Gruß, Martin
Hallo Martin,
in der CCU taucht der Aktor (wie bei Homematic üblich) nach dem anlernen unter Geräte auf (ich werde den Beitrag noch um ein Bild erweitern).
Da ich Symcon als Zentrale nutze ist es hier ein PHP-Script. Genau so gut geht es sicherlich mit einem HM-CCU Programm.
Zu erwähnen vielleicht noch das der Mäher TASTER hat, der Aktor jedoch ein Schalter ist. Ist jedoch im PHP-Script in der Funktion “funtion Taster” ersichtlich.
Hallo Simon,
danke für die schnelle Antwort, damit hast Du natürlich recht. Der Aktor taucht nach dem Anlernen in der CCU auf und kann dann weiter in beliebigen Programmen weiterverarbeitet werden. Mit dem Taster bzw. Schalter muss ich noch mal schauen.